Poziomica elektroniczna MEMS
Dwukanałowa, dwuosiowa poziomica MEMS z interfejsem ZigBee
Wyeliminowanie wpływu czynników środowiskowych na pracę komparatora masy ujawniło nowe, bardziej subtelne zjawisko – wpływ geometrii zawiesia. Nieznaczne odchylenia od właściwego położenia elementów głowicy pomiarowej skutkowało nagłą zmianą wskazania komparatora. Żeby możliwe było skuteczne zajęcie się tym problemem potrzebne było narzędzie, które pozwoliłoby poznać chwilowe położenie w przestrzeni i wzajemne zmiany tego położenia dla obu punktów zamocowania czujnika siły. Na dodatek pomiar musiał być nieinwazyjny – nie mógł wpływać na wyniki porównania masy. Wszelkiego rodzaju przewody, nawet najdelikatniejsze, mogły zakłócać pracę komparatora. Tak zrodziła się koncepcja bezprzewodowej, dwukanałowej i dwuosiowej poziomicy elektronicznej.
Pierwsze rozważania kierowały uwagę w stronę modułów rozwojowych ST Microelectronic Primer 2. Moduły te zawierają wbudowany 32-bitowy mikrokontroler z rdzeniem ARM Cortex 3, trzyosiowy akcelerometr MEMS, kolorowy wyświetlacz graficzny, baterię Li-Poly z ładowarką (via USB) i przetwornicą, wytwarzającą wszystkie potrzebne napięcia. Do pełni szczęścia brakowało tylko interfejsu radiowego do stanowiska pomiarowego.
Bezpośredni odczyt położenia z wyświetlaczy graficznych nie był zbyt praktyczny, zwłaszcza w sytuacji, gdy głowica komparatora znajdowała się kilka metrów nad ziemią. Zależało nam także na możliwości rejestrowania trajektorii, którą porusza się zamocowanie czujnika w trakcie ustalania się wskazań.
Moduł Primer 2 wprawdzie posiada interfejs do karty flash Micro SD, w której można by rejestrować wszystkie odczyty położenia. Przyjęcie takiego rozwiązanie narzucało analizę wyników w trybie off-line i dodatkowo wymuszało opracowanie metody synchronizacji niezależnie wykonywanych pomiarów położenia górnego i dolnego zamocowania głowicy pomiarowej komparatora. Uznałem, że lepszym i prostszym w eksploatacji rozwiązaniem będzie transmitowanie on-line wyników pomiarów i bieżąca analiza w zasobach stacji pomiarowej (PC).
Poszukiwania interfejsu radiowego, który można by wbudować do modułu
Primer 2 pokazały, jak “bogaty” jest rynek i jednocześnie jak wiele pracy wymaga zbudowanie kompletnego stosu protokołowego dla transmisji radiowej. Po trzech różnych próbach (Aurel, Microchip, Quasar) i blisko dwóch miesiącach uznałem, że jest to ślepa uliczka, zwłaszcza dla projektu, w którym nie jest to cel sam w sobie, a jedynie droga do wyeliminowania kabla.
Ponowna analiza potrzeb i dostępnych rozwiązań naprowadziła mnie na rozwiązanie, występujące pod handlową nazwą MotionBee. Jest to stworzony przez ST Microelectronic układ interfejsu ZigBee 802.15.4 SN250 zintegrowany z trzyosiowym akcelerometrem MEMS LIS3LV02DL.

Moduł MotionBee
Weryfikacja funkcjonalności tego rozwiązania potwierdziła założenia. Od tego momentu mogłem całkowicie skupić się na oprogramowaniu do wizualizacji pomiarów. Posiadane biblioteki skłoniły mnie do wyboru Delphi, jako języka, środowiska i narzędzia.
Przyjąłem następujące założenia projektowe:
- dwa niezależne kanały pomiarowe – poziomica górna i dolna ,
- poziomice dwuosiowe, wizualizowane jako poziomice bąbelkowe tzw. “bycze oko” (Bull eye),
- pomiar kąta odchylenia od poziomu w zakresie ±3° w obu osiach,
- graficzne przedstawienie odchylenia z rozróżnieniem zakresu ±0.26°, ±0.58° i ±0.81°,
- cyfrowe skale dla osi podłużnej i poprzecznej z rejestracją odchyleń maksymalnych i zakresem ±1°,
- skala odchylenia całkowitego podzielona na obszary błędu do 10ppm, do 50ppm i powyżej 50ppm,
- możliwość rysowania śladu trajektorii, jaką porusza się zamocowanie głowicy pomiarowej,
- wskazanie odchylenia w mierze kątowej (°) oraz w mm/m,
- pomiar różnicy odchyleń górnego i dolnego zamocowania,
- zerowanie pomiaru z kasowaniem historii odczytów,
- możliwość swobodnego ustalania parametrów toru transmisyjnego i orientacji czujników,
- możliwość programowej kalibracji mechanicznego ustawienia czujników,
- możliwość selektywnego włączania obu kanałów pomiarowych,
- sygnalizacja aktywności kanału radiowego w danym kanale pomiarowym,
- dostępny tryb demo do weryfikacji interfejsu graficznego bez pomiarów.
Oprogramowanie w wersji gotowej do eksploatacji powstało do połowy lutego’2010. Poniższy rysunek pokazuje zawarty w oprogramowaniu interfejs do użytkownika.

Dwuosiowa poziomica MEMS ZigBee - okno programu
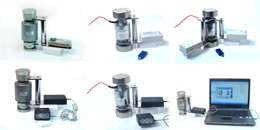
Zainstalowanie interfejsu pomiarowego – czujników MotionBee na głowicy komparatora, umożliwiło wykonanie pomiarów i zebranie bardzo interesujących obserwacji. Pomimo “prowizorycznej” instalacji układy pomiarowe działały stabilnie, a wyniki były powtarzalne.
 Czujnik MotionBee na górnej pokrywie głowicy komparatora |
 Czujnik MotionBee na dolnej pokrywie głowicy komparatora |
 Głowica komparatora z zainstalowanymi czujnikami - podczas testów |
 W trakcie badania - w oczekiwaniu na ustabilizowanie się zawiesia |
Pierwszym rezultatem z przeprowadzonych badań było stwierdzenie, że odchylenie dolnej części obudowy głowicy wpływa na wynik pomiaru komparatora w sposób pomijalnie mały. Jednocześnie zauważono, że nawet bardzo niewielkie odchylenie górnej części obudowy głowicy komparatora znacząco zmienia wyniki pomiaru. Pierwsze rezultaty przeprowadzonych badań utwierdziły konstruktorów komparatora w przekonaniu, że o powtarzalności pomiarów w ustabilizowanych warunkach otoczenia decyduje niezmienne położenie górnego zawiesia głowicy komparatora.
Przyjęto także wniosek o konieczności zbudowania nowego stanowiska pomiarowego do wzorcowania wzorców masy, gwarantującego “by design”, zwiększoną stabilność położenia górnego zamocowania głowicy komparatora w trakcie wykonywania pomiarów.